Abstract - For pharmaceutical solid products, the
issue of reproducibly obtaining their desired end-use properties depending on
crystal size and form is the main problem to be addressed and solved in process
development. Lacking a reliable first-principles model of a crystallization
process, a Bayesian optimization algorithm is proposed. On this basis, a short
sequence of experimental runs for pinpointing operating conditions that
maximize the probability of successfully complying with end-use product
properties is defined. Bayesian optimization can take advantage of the full
information provided by the sequence of experiments made using a probabilistic
model of the probability of success based on a one-class classification method.
The proposed algorithm’s performance is tested in silico using the crystallization and formulation of an API
product where success is about fulfilling a dissolution profile as required by
the FDA. Results obtained demonstrate that the sequence of generated
experiments allows pinpointing operating conditions for reproducible quality.
Keywords--Bayesian
Optimization, Quality control, Crystallization, Gaussian Processes.
I. INTRODUCTION
Crystallization is one of the most
commonly used purification methods in the pharmaceutical industry (Gao et al., 2017; Lucke et al., 2018). Lacking tight control of operating conditions and
due to a post-crystallization product formulation, there exists a significant level
of intrinsic variability which makes quite probable for the solid product to
fail quality tests (Sun et al.,
2012). Lacking a reliable first-principles model that properly account for the
intrinsic process variability, the parameters of the operating policy are set
by trial-and-error learning or using derivative-free optimization methods such
as the Nelder-Mead simplex or pattern search which are very inefficient, cannot
handle multiple optima and easily get astray when facing noisy objective functions
(Fujiwara et al., 2005). Moreover,
the outcome of tests for end-use product properties is binary (success or
failure) which renders known optimization methods inadequate (Colombo et al., 2016).
One of the main challenges in the development
of novel products with target end-use properties is efficiently exploring the
vast search space of operating conditions in the face of uncontrolled
variability as approaches that rely on trial-and-error are impractical (Lookman
et al., 2019; Talapatra et al., 2019). Active learning and
adaptive experimental designs are the alternative of choice to effectively
navigate the vast search space iteratively to identify promising policies for
guiding experiments and computations. In materials science applications,
resorting to a probabilistic surrogate model of uncertainty together with a
utility function that prioritizes the decision-making process on unexplored
region of interest is commonly used for planning a rather short sequence of
highly informative experiments (Xue et al.,
2016; Pruksawan et al., 2019).
In this work, a
novel Bayesian optimization algorithm is applied to a seeded batch crystallizer
with cooling to obtain crystal particles with proper size distributions.
Experimental optimization of the operating policy is required to obtain a final
product with the required end-use properties such as bioavailability. A
Bayesian optimization algorithm is proposed to fine tune the process parameters.
A short sequence of experimental runs for pinpointing operating conditions that
maximizes the probability of successfully complying with quality tests is obtained.
Bayesian optimization takes advantage of the full information provided by the sequence
of experiments made using a probabilistic model (Gaussian process) of the
probability of success based on a one-class classification method. The novel
metric which is maximized to decide the conditions for the next experiment is
designed around the expected improvement for a binary response, i.e. is based
solely on the sequence of binary outcomes (success/failure). That is, the
proposed method does learn from each individual experiment.
II. METHODS
A. Bayesian
optimization with binary outcomes
Given an initial Region of Interest (ROI) for the controlled inputs, an
unknown objective function p :
for the controlled inputs, an
unknown objective function p :  ®[0, 1] descriptive of the probability of complying
with product end-use properties and a maximum budget of n experiments, the problem of sequentially making decisions
®[0, 1] descriptive of the probability of complying
with product end-use properties and a maximum budget of n experiments, the problem of sequentially making decisions  which are rewarded by a “success"
with probability p(x) and “failure" with probability 1
̶ p(x), is
to recommend, after n experiments,
the operating conditions x* that
maximizes p. Note that the choice of the
operating conditions for each experiment xi
in the sequence is based solely on knowledge of the binary outcomes
which are rewarded by a “success"
with probability p(x) and “failure" with probability 1
̶ p(x), is
to recommend, after n experiments,
the operating conditions x* that
maximizes p. Note that the choice of the
operating conditions for each experiment xi
in the sequence is based solely on knowledge of the binary outcomes  from previous runs. The observations at
from previous runs. The observations at  are assumed drawn from a Bernoulli distribution
with a success probability
are assumed drawn from a Bernoulli distribution
with a success probability , see Colombo et al. (2016) for details. The probability of success is related to
a latent function
, see Colombo et al. (2016) for details. The probability of success is related to
a latent function  that is mapped to a unit interval by a
sigmoid transformation. The transformation used is the probit function
that is mapped to a unit interval by a
sigmoid transformation. The transformation used is the probit function  , where Φ denotes the
cumulative probability function of the standard Normal density.
, where Φ denotes the
cumulative probability function of the standard Normal density.
As there do not exist correct examples of the
success probability p over ROI but only evaluative feedback from binary outcomes {-1, +1}, Gaussian
processes (GPs) for one-class
classification is used here for probabilistic modelling of the objective
function of interest. The class of interest defines a small region of operating
conditions with a high probability of success. Accordingly, the main
uncertainty is about the location of the boundary for this class of interest
for reproducibility.
At the observed inputs, the latent variables  are assumed to follow a Gaussian prior
distribution. Given a training set D
= (X, y), the probabilistic model chosen p(yi|D, xi) aims to predict the target value yi for a new experiment xi by computing the posterior probability
are assumed to follow a Gaussian prior
distribution. Given a training set D
= (X, y), the probabilistic model chosen p(yi|D, xi) aims to predict the target value yi for a new experiment xi by computing the posterior probability , where
, where  is the covariance matrix and
is the covariance matrix and  m is the mean function. Since neither
of the class labels is considered more probable, the prior mean is often set to
zero. As a GP generates an output
m is the mean function. Since neither
of the class labels is considered more probable, the prior mean is often set to
zero. As a GP generates an output  in the range
in the range  , a monotonically increasing
response function
, a monotonically increasing
response function  is used to convert the GP outputs to values
within the interval [-1, 1] which can be interpreted as class probabilities
(Rasmussen and Williams, 2006).The latent GP
is used to convert the GP outputs to values
within the interval [-1, 1] which can be interpreted as class probabilities
(Rasmussen and Williams, 2006).The latent GP  defines a Gaussian probability density function
defines a Gaussian probability density function
 for any input
for any input  . At any given x, the corresponding probability density for the positive class (success)
is defined as
. At any given x, the corresponding probability density for the positive class (success)
is defined as  .
.
Bayesian optimization takes advantage of the full information
provided by the sequence of experiments made using a probabilistic metamodel (a Gaussian process, see Rasmussen and
Williams (2006)) of the real system being optimized. This metamodeling approach
to simulation optimization is known as Kriging
(Shahriari et al., 2016). To balance
exploitation with exploration, an acquisition
function a is used to decide the combination of design variables for the next
experiment or simulation run. In this work, the expected improvement for binary outcomes over the policy parameter
domain  given sampled data in
given sampled data in  is used as the acquisition
function (Tesch et al., 2013; Wang et al., 2016; Luna and Martínez, 2018).
The chosen acquisition function was designed to account for a trade-off between
exploiting what is already known about a small region with high probability of
success or exploring uncharted regions of operating conditions to find (hopefully)
a reduced ROI with an even higher
probability of success. A pseudo-code of Bayesian Optimization is given in Fig.
1.
is used as the acquisition
function (Tesch et al., 2013; Wang et al., 2016; Luna and Martínez, 2018).
The chosen acquisition function was designed to account for a trade-off between
exploiting what is already known about a small region with high probability of
success or exploring uncharted regions of operating conditions to find (hopefully)
a reduced ROI with an even higher
probability of success. A pseudo-code of Bayesian Optimization is given in Fig.
1.
Based
on n0 initial data points
in D0, a
first approximation to the objective function using Gaussian Processes is made
upon which the acquisition function is maximized, and the next combination  of decision
variables is obtained. The corresponding value of the objective function
of decision
variables is obtained. The corresponding value of the objective function  is obtained and dataset
is obtained and dataset  is augmented. The probabilistic metamodel
is augmented. The probabilistic metamodel  (Gaussian Process) is then updated and a new
iteration begins.
(Gaussian Process) is then updated and a new
iteration begins.

Figure 1: Bayesian optimization of the probability of
success.
B. Process
description
The method is tested
with an in silico example for the
crystallization and formulation of an active Pharmaceutical Ingredient (API).
The API is derived from the reactor to the downstream processing steps. The
solution containing the API is loaded to a crystallizer. The solid is then
separated (via filtration and centrifugation) and dried. The purified crystals
are then mixed with excipients and compacted into solid dosage form (i.e.
tablets). The final product should be assessed in a dissolution test to verify
that it fulfills a dissolution profile required by the Food and Drug
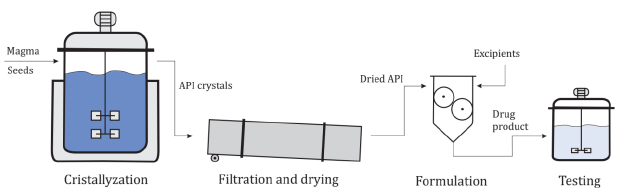
Administration (FDA) of the Unites States. The overall process is shown in Fig.
2. The crystallizer operates in batch mode with an initial crystal seeding and
following a temperature profile which is like the one proposed by Chung et al. (1999). The magma enters at saturation
temperature and supersaturation is caused by the reduction of solubility due to
steadily lowering the temperature. The temperature T at any given time t is set
to perform the following profile:
 (1)
(1)
In Eq. 1, T0 and Tf are the initial and final temperature, tf is the batch duration and γ is a process
parameter of the temperature profile. The four optimization variables
considered are closely related to the crystallizer´s operating conditions and
are presented in Table 1. Other process variables are assumed fixed hereafter.
They are summarized in Table 2.
Table 1. Optimization variables
|
Variable
|
Symbol
|
|
Mass of crystal
seeds [kg]
|
M
|
|
Mean diameter of
crystals [m]
|
dm
|
|
Coefficient of
variance [%]
|
CV
|
|
Temperature
profile parameter
|
|
Table 2. Fixed variables
|
Variable
|
Symbol
|
Value
|
|
Mass of magma
[kg]
|
Ms
|
7570
|
|
Initial
temperature [°C]
|
T0
|
35
|
|
Final
temperature [°C]
|
Tf
|
15
|
|
Batch duration
[min]
|
|
240
|
Once the
crystallization step is finished and the crystals are filtered and dried, the
formulation step begins. The API is mixed with excipients and fractionated into
tablets. A Gaussian error distribution with a 5% standard deviation in the API
content is introduced in this processing step to simulate a source of intrinsic
variability in the overall process of Fig. 2. Once the tablets have been
obtained, they are tested in a dissolution assay. The test is performed in an
agitated vessel that simulates the conditions in the human stomach (pH and
temperature) as a proxy for bioavailability assessment. The tablets are subjected
to grinding, then placed in the test vessel and the API concentration is
measured at several sampling times. The concentration profile of the tablets is
then compared with a reference profile. Two factors, f1 and f2,
are calculated according to the Guidance for Industry FDA-1997-D-0187 provided
by the FDA (1997):
 (2)
(2)
 (3)
(3)
In the Eqns. 2
and 3, Rp is the reference value and Cp is the test value for the percent
dissolution of the API. In order to pass the test, f1 should be less than 15% and f2 should be higher than 50%. In this work, the reference
profile for an API with a maximum content of 50 mg in 1 kg of solvent is shown
in Table 3. Intrinsic variability of product formulation pose a challenge to
repeatedly follow the reference profile.
C. In silico model
The crystallizer is
simulated using the method of moments to calculate the main characteristics of
the crystal’s size distribution. The equations for describing nucleation and
growth rates are:
[#/m3.s] (4)

 (5)
(5)
 (6)
(6)
Table 3. Reference dissolution profile
|
Time [min]
|
Concentration [mg/kg]
|
|
0
|
0
|
|
15
|
4.92
|
|
30
|
9.48
|
|
45
|
13.70
|
|
60
|
17.57
|
|
75
|
21.05
|
|
90
|
24.34
|
|
120
|
30.03
|
|
180
|
38.80
|
|
240
|
45.30
|
In
the Eq. 6, C is the API product concentration
in the magma. The density of the API is 1050 kg/m3 and its
solubility is a function of the crystallizer temperature:

(7)
Using
these equations, the moments µ of the distributions can be calculated
(Hulburt and Katz, 1964). The formulation step and the dissolution assay in the
test vessel modify the moments according to a dilution factor fd, that accounts for both
the formulation and the change of volume from one tank to another:
 (8)
(8)
The
dilution factor is calculated as the API dissolution needed to achieve approximately
50 mg/kg in the test vessel (if dissolution is total), adding white noise of 5%
to account for the intrinsic variability of the process. Finally, the moments
are reduced while diluting. The dissolution rate and the API solubility in the
new media are modeled by:
 [m/s] (9)
[m/s] (9)
 (10)
(10)
III. RESULTS
The proposed
Bayesian optimization method in Fig. 1 is applied as follows. For each
operating policy tried, a crystallizer run is performed. The product crystals
are dried, formulated and tested according to the dissolution assay. If the
product successfully passes the dissolution assay (observation: +1), the run is
considered successful, otherwise the experiment is considered a failure (observation:
-1). An initial design of crystallization experiments to begin with, n0, is defined using Latin Hypercube
Sampling. Using the initial data set, the hyper-parameters of the GP metamodel are estimated. Then, the method proposes the next experiment by
maximizing the acquisition function. The experiment is performed to generate
additional data, which is used to update the GP metamodel. This is repeated until a maximum number n of experiments has been made. The
trained GP for the one-class
classification model is then used to solve the optimization problem that aims
to maximize the probability of success of the process by finding the optimal
operating policy for the crystallizer. Finally, the estimated optimal policy
can be tried experimentally several times to estimate the true probability of
success for the solution found. Typically, due to the intrinsic process
variability this probability rarely is equal to 1.
The initial and
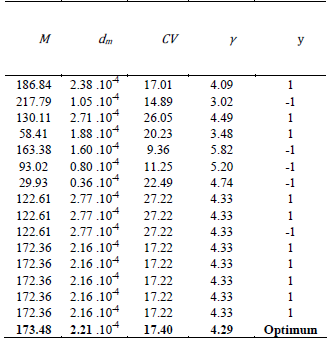
total number of experiments n0 and n are set to 7 and 15, respectively. The expected improvement for
binary outcomes is chosen as the acquisition function. A summary of the
experiments is presented in Table 4. After the initial set of experiments, the
method tries an operating policy until one of the experiments doesn´t fulfill
the end-use properties. After that, the method chooses a new operating policy
and performs all the remaining experiments with it. Finally, an extra optimization
step is carried out and the optimum is found to maximize the probability of
success.
The values for
the policy parameters are shown at the bottom of Table 4. The probability of
success of the estimated optimal policy is approximately 100%. This is quite
remarkable, given the low number of experiments performed and the complexity of
the experimental optimization task: the probability of success of the operating
policy must be obtained from binary responses of the experiments in a
four-dimensional design space.
The evolution of
the GP is shown in Fig. 3. The GP is initially trained with the first seven
experiments, giving rise to the probability of success presented in Fig. 3(a). Only
the first two elements of the operating policy (M and dm) are shown, while the other two are fixed at the optimal values
found for the sake of clarity.
The initial
approximation in the form of a GP to the probability of success helps
identifying a small region of operating conditions with higher probabilities of
success, but the surface maximum is still flat, and more experiments are
clearly needed. The GP is then increasingly updated with new experimental data
and the final approximation to the probability of success after the last
iteration is presented in Fig. 3(b). As can be seen there exists an optimum
that is clearly distinguishable, with a maximum value for the success
probability that is very close to 1. As exploitation of the generated knowledge
is emphasized, the estimated maximum and nearby conditions will receive more
attention and exploration vanishes.
It is noteworthy
that the last five experiments of the available budget are made using the very
same operating policy (see Table 4). This is due to bias introduced through
hyper-parameters in the one-class classification model. In this work, to separate
the positive class from the failure class, the following radial basis function
is used:
 (11)
(11)
Table 4. Optimization results
The
hyper-parameter  in Eq. 11 defines the characteristic
length scale of the positive (success) class. The smaller the value of this parameter,
the tighter (and smaller) the final ROI found by the Bayesian optimization algorithm
in Fig. 1. Typically, to make enough room for exploration is better to choose
initially high values for , and then profile down its values as more data is gathered. As a result, exploitation is favored over
exploration as the budget for experimentation is being consumed. Eventually,
gradual reduction of this hyper-parameter left almost no room for exploration.
Note that the parameters of the operating policy must be conveniently scaled
when defining the one-class classification model using the function in Eq. 11.
The interested reader is referred to related works for details (Kemmler et al., 2013; Xiao et al., 2015).
in Eq. 11 defines the characteristic
length scale of the positive (success) class. The smaller the value of this parameter,
the tighter (and smaller) the final ROI found by the Bayesian optimization algorithm
in Fig. 1. Typically, to make enough room for exploration is better to choose
initially high values for , and then profile down its values as more data is gathered. As a result, exploitation is favored over
exploration as the budget for experimentation is being consumed. Eventually,
gradual reduction of this hyper-parameter left almost no room for exploration.
Note that the parameters of the operating policy must be conveniently scaled
when defining the one-class classification model using the function in Eq. 11.
The interested reader is referred to related works for details (Kemmler et al., 2013; Xiao et al., 2015).
A comparison of
the performance of two operating policies is shown in Fig. 4. In Fig. 4(a), an
arbitrarily chosen policy with parameters at the center of the design space is
run 100 times. Run outcomes that do not fulfill the f1 or f2
criterion are shown in dark blue, while the ones that do comply with dissolution
specifications are shown in light blue. The optimal policy from Table 4 is
shown in Fig. 4(b). As can be seen, all these runs made using the optimal
policy fulfill the dissolution test criteria.
In order to test the robustness of the proposed approach, the
algorithm was repeated 100 times. The average probability of success of the
resulting operating policies is 93.9%, with 92 of the results having a probability
of success of 80% or higher, and 72 of them having a
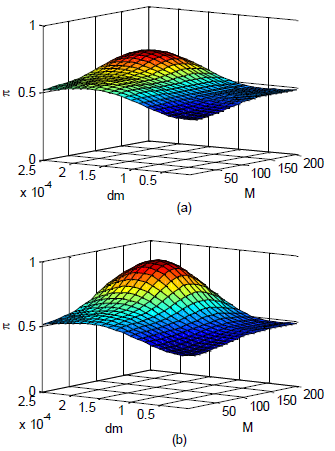
Figure 3: Projected approximations of the probability
of success π over
the ROI. (a) after the initial sampling
and (b) after the optimal operating policy is found.
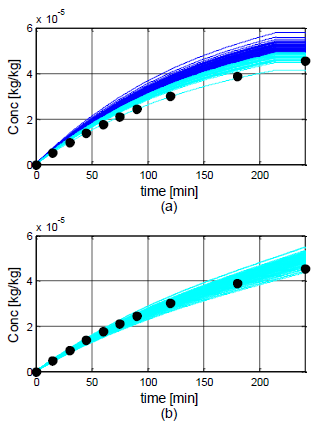
Figure 4: Dissolution profiles for (a) an arbitrary
operating policy and (b) the optimal operating policy. Light blue lines are
runs that successfully passed the test and dark blue lines are runs that did
not. The target profile is shown with circles.
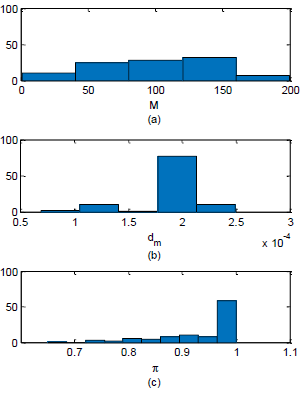
Figure 5: Histograms for the first (a) and second (b),
policy parameters (M
and dm) of the optimal operating policy; (c) the
probability of success for the optimal solution found.
probability of 90% or higher. Histograms of
the first two policy parameters (M
and dm) of the optimal
operating policies and their probability of success are presented in Fig. 5.
It is worth noting that the proposed experimental optimization method
is quite robust despite just a few experiments were performed. If the total
number of experiments were increased, the results will certainly improve. As an
example, by doubling the number of experiments (from 15 to 30), the average probability
of success of the optimal operating policies rises to 95.3%, and 96 of the
results have a probability of success of 80% or higher, whereas 83 of them have
a probability of 90% or higher. As can be expected, there is a trade-off
between the cost of experimentation and the quality of the solution found.
IV. CONCLUSIONS
The
applicability of Bayesian optimization in guaranteeing end-use product
properties of crystallization processes has been discussed. Optimization
results are promising bearing in mind the intrinsic level of variability
considered in the formulation step, and that Bayesian optimization does not
require a first-principles model of the crystallization and formulation
processes. Also, Bayesian optimization takes advantage of any available data
and imperfect models. Furthermore, the proposed approach is robust to both
noise and outliers. Current research efforts are focused on considering
multiple objectives and autonomous setting of hyper-parameters.
REFERENCES
Colombo, E., Luna, M.F. and
Martínez, E.C. (2016). “Probability-Based Design of
Experiments for Batch Process Optimization with End-Point Specifications,” Ind. Eng. Chem. Res., 55, 1254−1265.
Chung, S.H., Ma, D.L. and Braatz, R.D. (1999). “Optimal seeding in
batch crystallization,” The Canadian journal of chemical engineering, 77, 590-596.
FDA. (1997). “Dissolution testing of immediate release solid oral
dosage forms,” Food and Drug Administration, Center for Drug Evaluation and Research. Report FDA-1997-D-0187.
Fujiwara, M., Nagy, Z.K., Chew, J.W and Braatz, R.D. (2005).
“First-principles and direct design approaches for the control of
pharmaceutical crystallization,” J.
Process Control,15, 493–504.
Gao, Z., Rohani, S., Gong, J. and Wang, J. (2017). “Recent
Developments in the Crystallization Process: Toward the Pharmaceutical Industry,”
Engineering, 3, 343–353.
Hurlburt, H. and Katz, S. (1964). “Some problems in particle
technology,” Chem. Eng. Sci., 19, 555-574.
Kemmler, M., Rodner, E., Wacker, E.S. and Denzler, J. (2013).
“One-class classification with Gaussian processes,” Pattern Recognition, 46,
3507–3518.
Lookman, T., Balachandran, P.V., Xue, D. and Ruihao, Y. (2019).
“Active learning in materials science with emphasis on adaptive sampling using
uncertainties for targeted design,” npj
Computational Materials, 5,
1-21.
Lucke, M., Koudous, I., Sixt, M., Huter, M.J. and Strube, J. (2018).
“Integrating crystallization with experimental model parameter determination
and modeling into conceptual process design for the purification of complex
feed mixtures,”
Chemical Engineering
Research and Design, 133,
264–280.
Luna, M.F., and Martínez, E.C. (2018). “Sequential Bayesian
Experimental Design for Process Optimization with Stochastic Binary Outcomes,” Computer-Aided
Chemical Engineering, 43,
943-948.
Pruksawan, S., Lambard, G., Samitsu, S., Sodeyama, K. and Naito,
M. (2019). “Prediction and optimization
of epoxy adhesive strength from a small dataset through active learning,” Science and Technology of Advanced Materials,
20, 1010-1021.
Rasmussen, C.E. and Williams, C.K. (2006). Gaussian processes for
machine learning, MIT Press, Cambridge, MA.
Shahriari, B., Swersky, K., Wang, Z.,
Adams, R.P. and de Freitas, N. (2016). “Taking the Human Out of the loop: A
Review of Bayesian Optimization,” Proceedings
of the IEEE, 104, 148-175.
Sun,
J., Wang, F., Sui, Y., She, Z., Zhai, W., Wang, C. and Deng, Y. (2012). “Effect
of particle size on solubility, dissolution rate, and oral bioavailability:
evaluation using coenzyme Q10 as naked nanocrystals,” International J. of Nanomedicine, 7, 5733–5744.
Talapatra,
A., Boluki, S., Honarmandi, P., Solomou, A., Zhao, G., Ghoreishi, S.F., Molkeri,
A., Allaire, D., Srivastava, A., Qian, X., Dougherty, E.R., Lagoudas, D.C. and Arróyave
R., (2019). “Experiment Design Frameworks for Accelerated Discovery
of Targeted
Materials Across Scales,” Frontiers in
Materials, 6, 82.
Tesch,
M., Schneider, J., and Choset, H. (2013). “Expensive Function Optimization with
Stochastic Binary Outcomes,” J. of
Machine Learning Research, 28,
1283-1291.
Wang,
Y, Wang, C. and Powell, W. (2016). “The knowledge gradient for sequential
decision making with stochastic binary feedbacks,” J. of Machine Learning Research, 48, 1138-1147.
Xiao,
Y., Wang, H. and Xu, W. (2015). “Hyperparameter Selection for Gaussian Process
One-Class Classification,” IEEE Trans.
Neural Networks and Learning Systems, 26,
2182-2187.
Xue, D., Balachandran, P.V., Hogden, J., Theiler, J. Xue, D. and
Lookman, T. (2016). “Accelerated search for materials with targeted properties
by adaptive design,” Nature
Communications, 7, 11241.
Received October
21, 2019
Sent to Subject
Editor October 22, 2019
Accepted January
3, 2020
Recommended by Guest Editor: Carlos Apesteguia