Abstract-- In this work, we propose a modified version of
the classical 20 nodes serendipity element for the dynamic analysis of doubly
curved shells.
Instead of using the classical strain
displacements relations, we propose to formulate the strain displacements
relations in a general curvilinear coordinates. The main goal of the work is
putting forward a 3D element, valid for general shell structures, which
provides some desirable features like avoidance of locking and zero energy
modes with decreasing thickness and good behaviour in dynamic analysis. Until
now, most works are usually referred to shallow and thin shells. In this work
the study of the vibrational frequencies of transverse oscillations of
moderately thick shells by 3D elements for non shallow shells has been treated.
We expose also different kinds of mass matrices and study a close variant of
the classical lumped mass matrix.
Keywords-- Vibrations, finite elements, doubly curved
shells, 3D elements.
I.
INTRODUCTION
Vibration of shell structures is an
interesting topic that has been manifested in many aspects of civil engineering
and aeronautics. Shell structures are widely used in a variety of engineering
applications and have the ability to withstand significant loads precisely
because of its curvature which is responsible for providing additional
resistance that differentiates them from other structural elements as plates.
Within the shell
structures, the double curved ones, such as the hyperbolic paraboloid, the
elliptic paraboloid or the velaroidal shells are significant structures in the
field of civil engineering. Notwithstanding, the closed form solutions of the
equilibrium equations are not generally possible to obtain them and it has to
come to approximate methods Alhazza and
Alhazza (2004).
The treaties of Leissa
(1993) or Soedel (1993) are the first complete references to the dynamic
analysis of plates and shells. These
references study analytical solutions taking into account the equilibrium
equations along orthogonal coordinate lines and usually in a membrane
state.
General solutions of
the equilibrium equations of shells in a general curvilinear system, taking
into account the bending stresses, are a statically indeterminate problem so
that it is necessary to look to approximate methods like the Finite Element
Method.
FEM has been and is a
very powerful tool for solving differential or integral equations in the
context the structural calculation. A classical reference to this technique is
the work of Zienkiewicz and Taylor
(2000). Yang et al. (2004) show a
good review of the Finite Element Methods for shell structures that have been
developed since its inception back in the 60.
The dynamic study of
doubly-curved shells is of particular interest because of its complex geometry,
and the influence of the boundary conditions in the solution. Their approach by
MEF has been collected in various works such as Liew and Lim (1995, 1996), Stavridis
and Armenakas (1988) or Stavridis (1998).
They use degenerated shell elements with several enhancements to avoid
locking phenomenon but usually consider shallow shells and neglect shear
deformation.
The reappearance of
the three-dimensional finite elements in structural analysis is relatively
recent and may come, in part, coupled with the large computing power of today's
computers.
3D finite elements
present some advantages against the most common degenerated shell elements,
originally proposed by Ahmad et al (1970),
since they include the possibility of using three-dimensional constitutive laws
and do not use any kinematic assumption in deriving strain-displacement
relations unlike shell theories.
However, most of the
publications concerning to three-dimensional elements for the study of shells
do with elements of 8 nodes. In order to relieve the well known problem of
locking (membrane, shear and trapezoidal locking ) and zero energy modes, there
have been proposed a lot of stabilization methods, hybrid models etc. See for
example the work of Schwarze and Reese
(2009) which has an interesting description of this type of elements.
In this paper we have
preferred to use high order finite elements to address the problem. One
advantage of higher order elements against these is that the appearance of the
different lockings is much less significant. Specifically, we have tested the
20-node finite element (in its dynamic formulation) considering the strain
displacements relations in a general curvilinear coordinates.
Details of the
formulation and the results of some examples of interest are shown in the
following sections.
II. PROBLEM FORMULATION USING 3D FINITE ELEMENTS.
STIFFNESS MATRIX
For the reasons set out in the background, it
has been chosen the 20 nodes serendipity element for the dynamic study of
doubly curved shells. To define the shape functions, the isoparametric
formulation is used in a coordinate system with origin at the center of the element
(see Fig. 1).
In a compact form
these equations can be written in the well known form:
 (1)
(1)
for corner nodes, j=1,….,8;
![]() (2)
(2)
for mid-sides nodes, j=10,12,14,16.
![]() (3)
(3)
for mid-sides nodes, j=9,11,13,15.
![]() (4)
(4)
for mid-sides nodes j=17,18,19,20.
Using FEM, we have at
least two coordinate systems: a Cartesian coordinate system (x,y,z) and other isoparametric system (x,h,z).
To solve the dynamic
problem we have to find the stiffness matrix and the mass matrix of the element
and after assembling the stiffness matrix and the mass matrix of the structure.
In
matrix form we have to solve,
![]() (5)
(5)
where K is the stiffness matrix and M
the mass matrix of the structure.
This eigenvalue
problem is well known and can be obtained from the
The
stiffness matrix [ke] of
the element in local coordinates can be expressed as, Zienkiewicz (2000):
![]() (6)
(6)
where the matrix B is the relation between strains and
displacements, det[J] is the
determinant of the jacobian matrix and D is
the constitutive matrix.
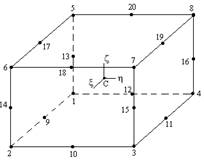
Figure
1: 20 nodes
serendipity finite element.
The relationship between strains and
displacement {e0} in the three-dimensional elasticity is:
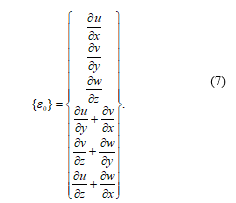
If these strain -
displacements relations are used, we would define the classical formulation of
the 20 nodes serendipity element.
This last relationship
can be written also,

If we take into
account the relationship between the Cartesian coordinate system and the
isoparametric one, we can express the derivatives of the displacements as
functions of the isoparametric system,

where the elements Gij are the
components of the inverse of the jacobian matrix.
Following this last
relation the matrix B can be written again as,

Finally the jacobian
matrix can be written,

where (xi, yi, zi) are the coordinates of
the nodes of the element.
Until now, we have
defined the classical formulation of the 20 nodes serendipity element. The
behaviour of this element in static and dynamic analysis of shells has been
proved satisfactory in several benchmarks. The coordinates of the nodes of the
elements provide all the necessary information for defining the element and the
shell (see Fig. 2).
In this work, a curvilinear local
reference frame at the medium surface of the shell is preferred to work with, for
an exact definition of the middle surface and to study the performance of the
new element in dynamic shell analysis (see Fig. 3).
The first step to keep in mind is to
recall the expression of the strains in a curvilinear system.
The expressions
relating strains and displacements in curvilinear coordinates are (Rekach, 1978):

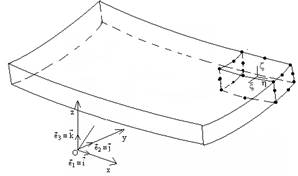
Figure 2: Cartesian
Reference Frame and the isoparametric system.
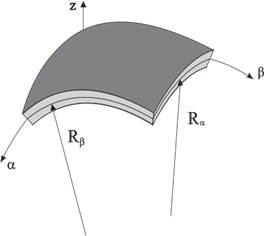
Figure 3: Curvilinear Local Reference Frame at the medium surface of the Shell
![]()
where eai are the normal strains, gij are the engineering shear strains, gij are the components
of the metric tensor referred to shell space, ai are the intrinsic coordinates of the surface
and vi are the
displacements. These well known
expressions are written in terms of the physical components so we can directly
interpolate the displacements.
Expanding these last relations we can obtain
more comfortable expressions,
![]() (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
![]() (18)
(18)
![]() (19)
(19)
![]() (20)
(20)
Or arranging these expressions in matrix form,

where displacements are
interpolated, as usual, using the shape functions Ni.
Here we have made the
approximation consisting in assimilating the metric tensor of the shell space gij to the reference
shell surface aij. So the equations (15-20) take the form described
in Eq. (21).
This assumption is
only valid for moderately thick shells.
The
constitutive equations in a general curvilinear coordinate system are quite
different from the Cartesian ones and have the expression,
![]() .(22)
.(22)
Following Voight
notation it can be expressed as a second order tensor in the form,

The corresponding
relations with their physical components are,
![]() , (24)
, (24)
where gab are the components of the metric
tensor (Wempner and Talaslidis, 2002).
At this point, we only
need to compute the differential volume element. Since we are working in a
curvilinear local reference frame, we need to express it, if it is possible, as
function of the curvilinear coordinates.
This relation is well
known and can be consulted, for example, in Itskov (2009),
![]() , (25)
, (25)
where H and K are the mean and
Gaussian curvature.
Let us note that all
quantities present in the stiffness matrix of the element are functions of the
thickness and the curvilinear coordinates.
III. MASS MATRIX OF THE
20 NODES SERENDIPITY ELEMENT. CONSISTENT AND LUMPED MASS MATRIX
In order to study the transverse
frequencies of the structural element concerned by the finite element method,
we must develop the mass matrix of the element. When we take the same shape
functions for interpolating the geometry of the element as to discretize the
kinetic energy, we have the so-called consistent mass matrix of the finite
element.
![]()
If we develop this
expression, we find:

Or in matrix form,

Another possibility in
this regard is to construct the lumped mass matrix. This mass matrix is
traditionally less effective than consistent mass matrix but more efficient to
be a square diagonal matrix. The mass of the element is concentrated uniformly
in all nodes.
![]() (29)
(29)
where a,b and c are the finite
element dimensions.
In this work, we have opted
for a more rational distribution of the masses at the nodes taking into account
the geometry of the element and the distribution of nodes in it.
If Lx, Lh and Lz are the dimensions of the element
according to isoparametric coordinates of the element, surface mapping and
lengths to calculate volume and mass associated with the nodes of the element
can be drawn considering the Figs. 4 and 5.

Figure
4:
Distribution of areas in the upper and lower surface of the 20 nodes element

Figure
5:
Distribution of areas in the medium surface of the 20 nodes element.

Figure
6: Hp-
Shell. Discretization by finite elements.
So that the masses
distribution at the nodes is not uniform but is made taking into account
geometrical and symmetry considerations of the contribution of each node to the
mass matrix of the element.
Since, the mass matrix
adopts the form
IV. RESULTS
To test the goodness of this work we
have previously tested the modified version of the 20 nodes serendipity element
with the results obtained by other authors with the hyperbolic paraboloid
shells, whose solutions are known according to the works of Narita and Leissa
(1984), Chakravorty and Bandyopadhyay
(1995) and Chakravorty et al. (1995),
but they used shell elements. The hyperbolic paraboloid test is quite demanding
both surface type (doubly curved shell) and the boundary conditions.
The data we have used
for the example are: hyperbolic paraboloid with curved edges, square planform 1´1 m side, constant thickness of 0.01 m, equal
radii of curvature and opposite in value R=2m, Young modulus E=10.92´106 N/m2, Poisson's ratio
0.30, density= 100 kg/m3, subjected to a uniformly distributed load
of 20 kN/m2 and clamped along the four edges. In all cases we have used the lumped mass
matrix proposed by the authors.
The frequency
associated with the first mode of vibration of the hyperbolic paraboloid
according the new formulation is 17, 23rad / s. The results obtained by the
above-named authors are:
·
Narita-Leissa:
17.16 rad/s
·
Chakravorty
: 17.25 rad/s
Displacements
associated with the second and third vibration modes, which have not been found
in the literature, are depicted in the following figures (see Figs. 7 and 8):
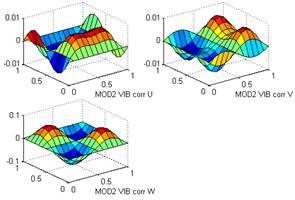
Figure7: Displacements (u,v,w)
associated with the second vibration mode of the hyperbolic paraboloid.
Modified version of the 20 nodes serendipity element.

Figure
8:
Displacements (u,v,w) associated with
the third vibration mode of the hyperbolic paraboloid. Modified version of the
20 nodes serendipity element.
In order to compare
high order modes of vibration, we compare the results with the work of Liew and
Lim (1996).
The results are
presented for the nondimensional frequency parameter λ given by,
![]()
The natural
frequencies w, the rectangular planform Lengths (a,b), and the shell thickness h are represented in this last equation.
For simply supported
hyperbolic paraboloid shell with square planform, the results are compared for
the first, fourth and eight vibration modes given in the work of Liew and Lim (1996).
In this case we take, v=0.3, a/b=1, b/h=100. The results are shown in the Table 1.
As we can see, there
exists a good agreement between the results if the shallowness ratio is small.
But if the shallowness ratio increases, the differences become greater.
The results obtained
with the classical formulation of the 20 nodes element, is closer to the results
of the work of Liew and Lim (1996).
In order to compare
the results with moderately thick shells, we use the parameter l’, given by
Table 1: Comparison of
frequency parameter λ for simply supported thin hyperbolic
paraboloidal shells and various values for b/Ry
and Ry/Rx. Modified version of the 20
nodes serendipity element.
|
b/ Ry |
Ry/ Rx |
Mode sequence number |
1 |
4 |
8 |
|
0.1 |
1 |
Liew and Lim
(1996) |
42.688 |
83.136 |
130.86 |
|
Present |
42.681 |
84.062 |
133.80 |
||
|
05 |
Liew and Lim
(1996) |
36.713 |
81.902 |
130.71 |
|
|
Present |
36.715 |
82.887 |
133.52 |
||
|
0.3 |
1 |
Liew and Lim
(1996) |
104.02 |
110.78 |
150.76 |
|
Present |
103.42 |
110.79 |
151.22 |
||
|
0.5 |
Liew and Lim
(1996) |
75.152 |
102.10 |
148.35 |
|
|
Present |
75.082 |
102.25 |
148.99 |
||
|
0.5 |
1 |
Liew and Lim
(1996) |
148.74 |
159.39 |
198.54 |
|
Present |
145.62 |
160.34 |
196.79 |
||
|
0.5 |
Liew and Lim
(1996) |
105.48 |
136.48 |
177.97 |
|
|
Present |
104.66 |
137.11 |
178.99 |
Table2: Comparison of the
frequency parameter λ’ for simply supported
moderately thick hyperbolic paraboloidal shells. Comparison of the results
obtained with the Classical Formulation (C.F.) and the modified version of the
20 nodes serendipity element, new formulation, (N.F.).
|
b/ Ry |
Ry/ Rx |
Mode sequence number |
1 |
4 |
8 |
|
0.1 |
1 |
N.F. |
0.571 |
2.072 |
3.233 |
|
C. F. |
0.575 |
2.064 |
3.164 |
||
|
0.5 |
N.F. |
0.568 |
2.079 |
3.237 |
|
|
C. F. |
0.552 |
1.998 |
3.081 |
||
|
0.3 |
1 |
N.F. |
0.657 |
2.072 |
3.220 |
|
C. F. |
0.655 |
2.059 |
3.175 |
||
|
0.5 |
N.F. |
0.623 |
2.072 |
3.227 |
|
|
C. F. |
0.636 |
2.054 |
3. 192 |
||
|
0.5 |
1 |
N.F. |
0.784 |
2.051 |
3.182 |
|
C. F. |
0. 762 |
1.998 |
3.126 |
||
|
0.5 |
N.F. |
0.722 |
2.066 |
3.221 |
|
|
C. F. |
0.718 |
2.042 |
3.183 |
![]()
In this case we take, v=0.3, a/b=1, b/h=10.
We have analyzed the results with both versions of the 20 nodes
serendipity element, the classical formulation and the new formulation. Similar
conclusions can be derived regarding the previous analysis. It has to be taken
into consideration that the effect of the shear deformation has not been
neglected. The results are shown in the
Table 2.
To conclude our work,
we have also studied the natural frequencies of other kind of surfaces like the
cylindrical shell and the spherical shell. The boundary conditions are also
simply supported shell. The results with the new finite element are compared
again with the analysis of Liew and Lim (1996) are shown in Table 3, for v=0.3, a/b=1, b/h=100.
Given
these results, the efficiency of both elements is very high. However we
appreciate that the results obtained with classical formulation are closer to
the shallow shell theory whilst the new formulation is closer to the deep shell
theory. For simply supported shells it is observed that lower and higher
frequencies vary linearly with the shallowness ratio.
V. CONCLUSIONS AND FUTURE WORK
In this work, we have studied the vibrations of
doubly curved shells with 3D elements with a modified version of the classical
20 nodes serendipity element, considering the strain-displacement relations in a curvilinear system tangent to the
middle surface of the shell.
The exact knowledge of the metric tensor of the middle surface as well as
other geometric quantities provide
excellent results for non-shallow doubly curved shells. Besides, the problems
associated with low order displacements 3D finite elements, shear and
trapezoidal locking, which predict spurious shear and normal stresses, are
circumvented.
A rational approach to the lumped mass matrix has been used, taking into
account the geometry of the element. New results for moderately thick shells
have been obtained and important conclusions about the variation of the
frequencies´ with respect to the shallowness ratio have been deduced.
Results for the vibrations of other doubly curved shells with different
boundary conditions and the analysis of the sensitivity of the formulation to
element distortions will be presented in a future work due to its extension.
Table3: Comparison of the frequency
parameter λ for simply supported
thin cylindrical and spherical shell. Comparison of the results obtained with
the work of Liew and Lim (1996) and the new formulation of the 20 nodes
serendipity element.
|
b/ Ry |
Ry/ Rx |
Mode sequence number |
1 |
4 |
8 |
|
0.1 |
0 |
Liew and Lim
(1996) |
36.841 |
82.302 |
131.11 |
|
Present |
36.021 |
82.415 |
133.76 |
||
|
0.5 |
Liew and Lim
(1996) |
43.027 |
84.316 |
132.05 |
|
|
Present |
42.229 |
85.163 |
134.28 |
||
|
1 |
Liew and Lim
(1996) |
53.049 |
87.829 |
133.51 |
|
|
Present |
52.693 |
88.930 |
134.72 |
||
|
0.3 |
0 |
Liew and Lim (1996) |
66.574 |
104.95 |
151.49 |
|
Present |
66.157 |
106.10 |
153.64 |
||
|
0.5 |
Liew and Lim
(1996) |
86.927 |
118.41 |
158.69 |
|
|
Present |
86.001 |
118.83 |
160.24 |
||
|
1 |
Liew and Lim
(1996) |
121.99 |
139.21 |
169.68 |
|
|
Present |
119.54 |
141.58 |
170.55 |
||
|
0.5 |
0 |
Liew and Lim
(1996) |
88.431 |
140.07 |
182.95 |
|
Present |
87.984 |
143.01 |
183.63 |
||
|
0.5 |
Liew and Lim
(1996) |
127.81 |
165.19 |
200.99 |
|
|
Present |
128.54 |
167.73 |
202.38 |
||
|
1 |
Liew and Lim
(1996) |
188.59 |
201.27 |
239.87 |
|
|
Present |
200.63 |
202.46 |
241.51 |
REFERENCES
Ahmad, S., B. Irons and O.C. Zienkiewicz, “Analysis
of thick and thin shell structures by curved finite elements,” International Journal for Numerical Methods
in Engineering, 2, 419-451 (1970).
Alhazza, K. and A. Alhazza, “A review of the
vibrations of plates and shells,” The
Shock and Vibration Digest, 36, 377–395 (2004).
Chakravorty, D. and J. Bandyopadhyay, “On the free
vibration of shallow shells,” Journal of
Sound and Vibration, 185, 673–684 (1995).
Chakravorty, D., J.N. Bandyopadhyay and P. K. Sinha,
“Free vibration of point-supported laminated doubly curved shells–A finite
element approach,” Comput Struct,
54, 191–198 (1995).
Itskov, M., Tensor
Algebra and Tensor Analysis for Engineers: With Applications to Continuum
Mechanics, Springer (2009).
Leissa, A.W., Vibration
of Shells, Acoustical Society of America, Sewickly (1993).
Liew, K. and C. Lim, “Vibratory behaviour of doubly
curved shallow shells of curvilinear planform,” Journal of Engineering Mechanics, 121, 1277–1283 (1995).
Liew, K. and C. Lim, “Vibration of doubly-curved
shallow shells,” Acta Mechanica, 114,
95–119 (1996).
Narita, Y. and A.W. Leissa, “Vibrations of corner
point supported shallow shells of rectangular planform,” Earthquake Engineering and
Structural Dynamics, 12, 651–661 (1984).
Rekach, V.G., Manual
of the theory of Elasticity, Mir Moscow (1978).
Schwarze, M. and S. Reese, “A reduced integration
solid-shell finite element based on the EAS and the ANS concept-Geometrically
linear problems,” International Journal
for Numerical Methods in Engineering, 80, 1322-1355 (2009).
Soedel, W.,
Vibrations of Shells and Plates, Marcel Dekker, New York (1993).
Stavridis, L., “Dynamic analysis of shallow shells
of rectangular base,” Journal of Sound
and Vibration, 218, 861–882 (1998).
Stavridis, L. and A. Armenakas, “Analysis of shallow
shells with rectangular projection,” Journal
of Engineering Mechanics, 114, 943–952 (1988).
Yang, H., S. Saigal, A. Masud and R. Kapania, “A
survey of recent shell finite elements,” International
Journal for Numerical Methods in Engineering, 4, 101–127 (2004).
Wempner, G. and D. Talaslidis, Mechanics of Solids and Shells: Theories and Approximations, CRC
Press (2002).
Zienkiewicz, O.C. and L.R. Taylor, The Finite Element Method. Solid Mechanics,
Wiley (2000).
Received:
April 11, 2015.
Sent
to Subject Editor: November 30 2015.
Accepted:
April 13, 2016.
Recommended
by Subject Editor: Walter Tuckart